Introduction
The goal of the SSR computation module is to compute the orbits and clocks corrections that are necessary for the PPP (user side), and to encode these corrections in a well-defined standard (here the RTCM 3.1 standard). This module mainly uses as input the real-time measurements provided by a GNSS network, the computation is done by means of a Kalman filter.The real-time GNSS stations
network
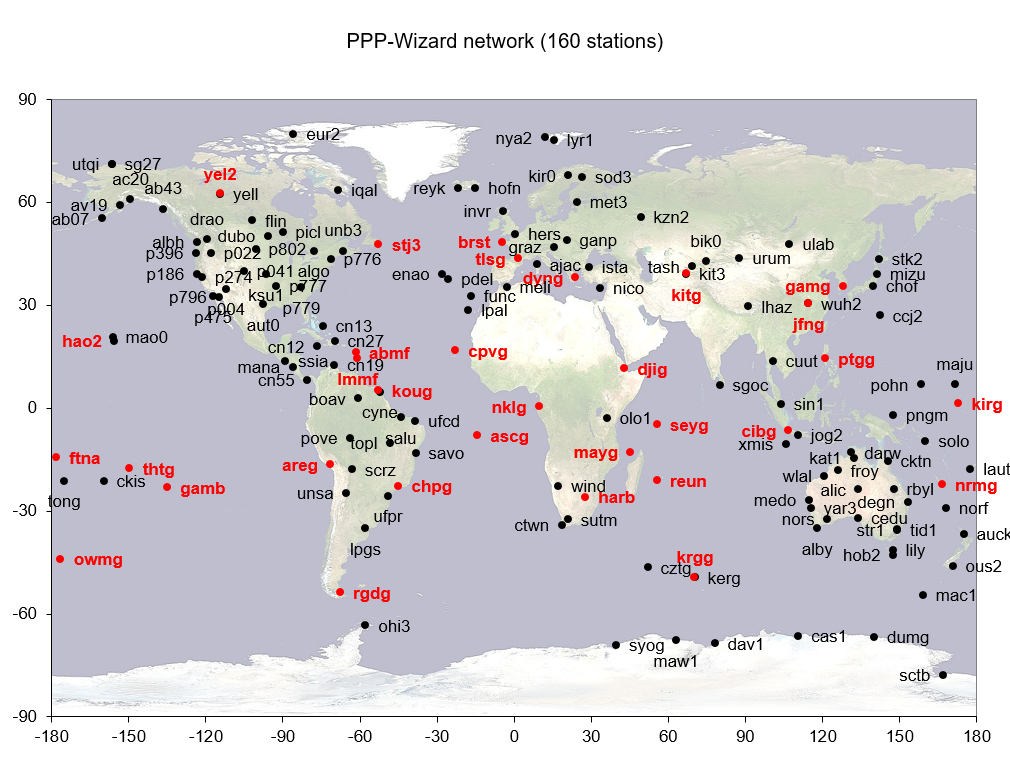
The SSR computation module relies upon a real-time GNSS networks of stations, made available to CNES thanks to its participation to the real-time IGS pilot project. Indeed, one of the goal of this pilot project is to collect and broadcast in real-time the measurements of some of the IGS network of GNSS stations.
In this framework, the CNES uses mainly the measurements collected by 2 'casters', or broadcast relays :
- The GFZ caster, which proposes more than 80 streams.
- The NrCan caster, which proposes some additional streams.
- The CNES own caster, which proposes streams operated by CNES.
The measurements are collected in real-time with the BNC tool. A typical network of real-time available stations (about 160) is represented on the following figure:
The other input interfaces
In addition to the real-time measurements, the SSR module uses a daily
interface with the IGS to recover the measurements necessary
for
the widelane clock computation. Another IGS interface allows to recover
ultra-rapid IGU orbits to feed the Kalman filter.The Kalman filter
The
core of the real-time implementation is the Kalman filter working in
mixed-mode (with both real- and integer-valued phase ambiguities). A
preprocessing step allows to detect cycle slips and to solve for the
integer widelane ambiguities. The N1 ambiguity fixing is performed
directly in the Kalman filter using network connectivity
considerations. The typical rate of the Kalman filter is 5 secondes,
for a total latency of 5 seconds. The parameters estimated in the
filter are detailled in the following table:|
Parameter nature |
Quantity |
Typical
number |
|
satellite phase clock |
1 per satellite |
34 |
|
station phase clock |
1 per station |
50 |
|
code/phase satellite clock bias |
1 per satellite |
34 |
|
code/phase station clock bias |
1 per station |
50 |
|
zenith troposphere delay |
1 per station |
50 |
|
station coordinates corrections |
3 per station |
50*3 |
|
satellite orbit corrections (R,T,N) |
3 per satellite |
34*3 |
|
Phase ambiguities |
12 per station (max) |
50*12 |
|
|
|
1070 |
Overview of the SSR module
The
following figure represents an overview of the SSR module (with its
interfaces):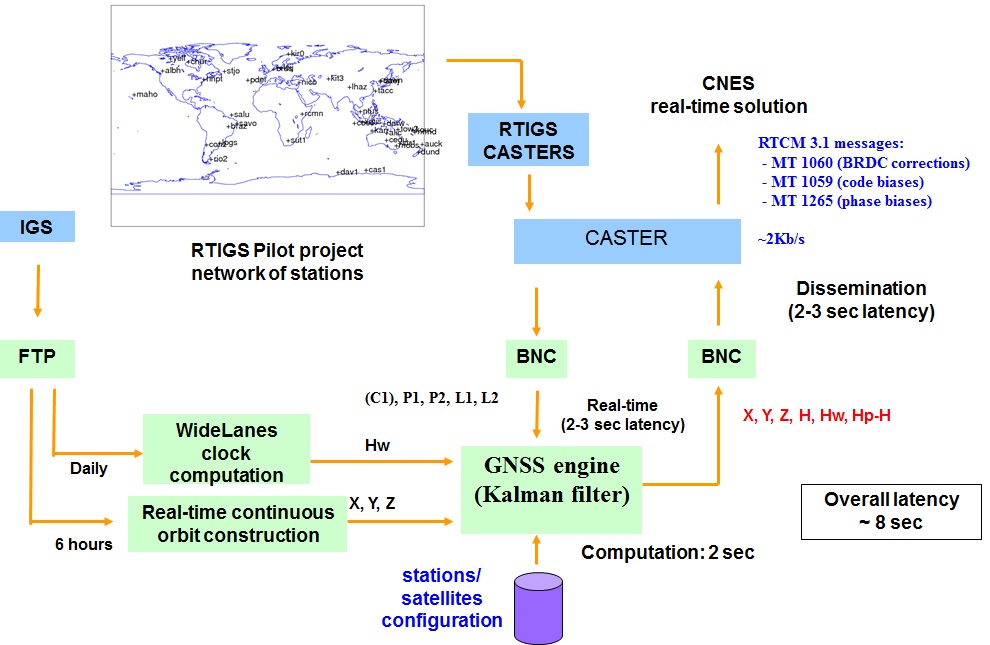
SSR products
|
Nature |
RTCM
Message |
Occurrence
(sec) |
|
|
GPS |
orbits/clocks |
1060 |
5 |
|
GPS |
code biases |
1059 |
5 |
|
GPS |
phase biases (L1, L2, L5) |
1265 |
5 |
|
Glonass |
orbits/clocks |
1066 |
5 |
|
Glonass |
code biases |
1065 |
5 |
|
Galileo |
orbits/clocks |
1243 |
5 |
|
Galileo |
code biases |
1242 |
5 |
|
Galileo |
phase biases (E1, E5a, E5b, E6) |
1267 |
5 |
|
Beidou |
orbits/clocks |
1261 |
5 |
|
Beidou |
code
biases |
1260 |
5 |
|
Beidou |
phase biases (B1, B2, B3) |
1270 |
5 |
|
|
Ionosphere
VTEC |
1264 |
60 |